This article is more than 1 year old
PRATCHETT chats to Oz from 31,000m above Planet Earth
Andrew Tridgell tunes into LOHAN avionics test flight
Servos and batteries
As regular readers know, the LOHAN mission has a custom set of Pixhawk parameters, outlined here. Whereas on the first test flight back in October last year, we were simply running the MAV_CMD_NAV_ASCEND_WAIT, aka ALTITUDE_WAIT, during which the Pixhawk wiggles the servos every 15 seconds, to prevent them freezing, this time around Tridge ran a full LOHAN mission, adapted for PRATCHETT as follows:
- ALTITUDE_WAIT to 30km, with AUTOTUNE enable after post-burst detection of a 15m/s descent rate.
- With AUTOTUNE enabled, execute LOITER_TO_ALT, aiming to circle slowly downwards and return home.
- At 1000m AGL, exit AUTOTUNE and execute landing approach.
Andrew noted: "Most other parameters were fairly standard, apart from having INTIAL_MODE=AUTO so it would start in auto if it happened to reboot in flight, and SKIP_GYRO_CAL to prevent it recalibrating if it had a power outage and restarting. The safety switch was also disabled."
Of course, the Pixhawk wasn't actually controlling an aircraft, but none the wiser, acted as if it were, becoming "suitably frustrated by the lack of success in getting its canards to operate", as Andrew put it.
All of this madness was relayed in real time to Tridge via the 900Mhz radio, and here's what he could see as the payload hit 18km...

...and 24km:

Naturally, I wasn't going to miss out on the fun, and Andrew shared his screen, meaning we were simultaneously monitoring in Australia and Spain, in a three-way Skype chat with David, while the mission unfolded in the US. Impressive stuff:

At the top right, you can see the graph indicating the servos operating every 15 seonds in "wiggle mode", while the snippet of Skype chat shows Tridge and David wrangling the radio, more on which in a minute.
Overall, the batteries performed as expected during the mission, and we're satisfied they can do the job, even if current draw may be greater during the descent phase of the real Vulture 2 due to aerodynamic forces putting extra strain on the servos. Here's the voltage plot for the entire flight:

Regarding temperatures, Andrew reported: "Here is a temperature plot from all the logged temperatures. The airspeed sensor probe got to -48°C at an altitude of around 18km. The other Pixhawk sensors stayed much warmer as they are warmed by the electronics."

What's important to note here is that the exposed airspeed sensor probe didn't freeze up, and it's therefore safe to assume that the one mounted in the nose of the Vulture 2...
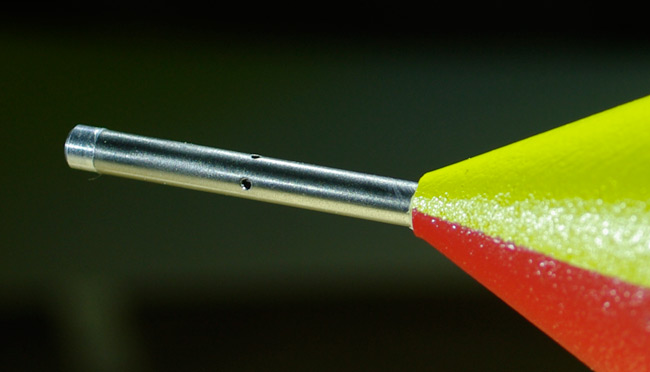
...will similarly avoid icing.
